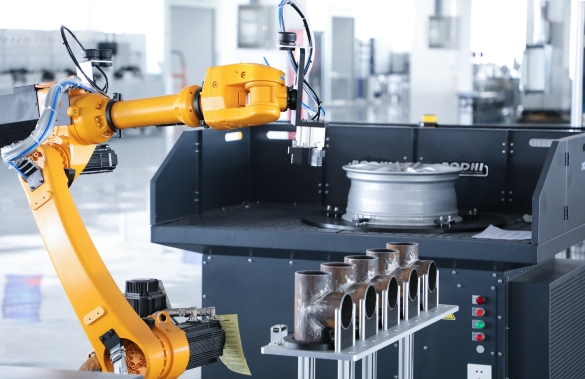

智能制造的重要家庭成员——工业机器人
智能制造是一种由智能机器和人类专家共同组成的人机...
2024-06-17
发布时间:2024-06-17
浏览量:622
工业机器人的定义与特点
定义:工业机器人是一种在三维空间中具有更大自由度的机器,能够实现多种拟人动作和功能。工业机器人是一种应用于工业生产的机器人。
特点:可编程、拟人、通用、机电一体化
工业机器人的子系统是什么?他们的角色是什么?
驱动系统:使机器人运行的驱动装置。机械结构系统:由机身臂端机械手三部分组成的多自由度机械系统。
感测系统:由内部感测模块和外部感测模块组成,获取内外部环境状态信息。
机器人-环境交互系统:一种实现工业机器人与外部环境中设备交互与协调的系统
人机交互系统:操作人员参与机器人控制与接触的装置
控制系统:根据机器人的操作指令程序和传感器反馈的信号,控制机器人的执行机构完成指定的运动和功能
机器人的自由度是多少?机器人的位置操作需要多少自由度?姿态操作需要多少自由度?为什么?
自由度指的是机器人的独立坐标轴运动的数目,不包括夹持器(端部机械手)的开闭自由度。
它需要六个自由度来描述物体在三维空间中的位置和姿态,三个自由度(腰肩肘)来操作位置,三个自由度(俯仰横摇)来操作姿态。
但工业机器人的自由度,但工业机器人的自由度是根据其用途设计的,可以小于6个自由度,也可以大于6个自由度。
工业机器人的主要技术参数是什么?
回答:自由度、重复定位精度、工作范围、最大工作速度和承载能力
机身和手臂有什么功能?在设计中应该注意什么?
答:机身是支撑手臂的部分,一般实现升降、旋转和俯仰运动。
注意:
1)有足够的刚度和稳定性
2)运动应灵活。起升运动导套长度不宜过短,以免卡死。一般应提供导向装置。
3)结构布置合理。手臂是支撑手腕和工件静、动载荷的部件,特别是在高速运动时,会产生较大的惯性力,造成冲击,影响定位精度。
设计手臂时,注意:
1)高刚性要求
2)良好的指导
3)重量轻
4)动作平稳,定位精度高。
其他传输系统应尽可能短,以提高传输精度和效率;各部件的布置应合理,操作和维护应方便;特殊情况应特别考虑,并应考虑热辐射对腐蚀环境的影响防止腐蚀。在危险环境中应考虑防暴。
手腕自由度的主要作用是什么?如果手可以在任何方向的空间,手腕应该有什么样的自由?
手腕上的自由度主要是达到手的所需姿势。为了使手在空间中向任何方向移动,要求手腕能够在空间中旋转三个坐标轴x y z。也就是说,它有三个自由度的倾覆俯仰和偏转。
手的功能和特点
机械手的功能:工业机器人的手又称末端机械手,用来夹持工件或刀具。
特点:
1)手是一个独立的部分
2)手是工业机器人的末端机械手。它不一定和人手的结构一样。能不能有手指:能不能有爪子或专用工具
3)手、腕关节处可拆卸
4)手的通用性差
根据握持原理,手的部件有哪些类型?具体包括哪些表格?
根据夹持原理,手的部分分为两种夹持方式:内支撑式夹持和外夹持式夹持,平动式夹持和外夹持式夹持,钩弹簧式夹持,吸附式夹持,磁力吸收式夹持和空气吸收式夹持。
根据工作原理,真空吸盘可分为几类?分别简要介绍了其工作原理
根据工作原理可分为:
1)真空吸盘利用真空泵吸出吸附头的空气,形成真空。
2)当流体速度增加时,物体与流体之间的界面压力减小,反之则压力增大。利用压缩空气和真空发生器,无需专用真空泵即可广泛使用
3)不需要真空泵系统,不需要压缩空气源。经济方便,但可靠性稍差。
液压传动与气动传动在工作力、传动性能和控制性能上的区别
1)工作力液压系统可获得较大的线性运动力和较大的旋转力。抓斗重量为1000 ~8000n。空气压力可以获得较小的线性运动力和较小的旋转力。抓斗重量小于300N
2)传输性能液压压缩传输是稳定而不影响小,基本上没有传输滞后,反映敏感的移动速度高达2米/秒,空气压力粘度、管道损失小,小流加速到较高速度,但高速稳定性差的影响更严重,通常圆筒50到500 mm / s
3)控制性能液压P流很容易控制,无级调速可以通过调整PQ,输出功率可以很容易地控制来实现更高的定位精度(- 0.5 ~ + 0.5)空气压力不容易控制速度较低,并且很难准确位置。一般不需要伺服控制(国外胭脂出口气压伺服机构可实现- 2mm ~ + 2mm的任意定位精度)。
伺服电机和步进电机的性能有什么不同?
一、控制精度不同(伺服电机的控制精度由电机轴后端的旋转编码器保证,伺服电机的控制精度高于步进电机)
二、不同的低频特性(伺服电机运行非常平稳,即使在低速下也不会有振动,一般情况下伺服电机的低频性能比步进电机要好)
三、不同的过载能力(步进电机无过载能力,伺服电机有很强的过载能力)
四、不同的运行性能(步进电机开环控制和交流伺服驱动系统闭环控制)
五、不同的速度响应性能(更好的交流伺服系统加速度性能
推荐新闻